
Gyere hozzánk podcastet készíteni!

Bérelhető a Mandiner korszerű stúdiója, mutatjuk a részleteket!
Az MIT Számítástudományi és Mesterséges Intelligencia Laboratóriumát sokáig igazgató Rodney Brooks napjaink vezető robotikusa. Állatokról és az emberről mintázott robotjait bizonytalan környezetekben teszteli, előbb-utóbb élő gépeket fejlesztene. Különleges szerkezetein keresztül igyekszik megérteni az emberi intelligenciát.
Elméleti tudós, robotfejlesztő és dokumentumfilm-hős
Ausztrál születésű, matematikusi tanulmányait a Flinders Egyetemen (Adelaide) végezte, számítástudományi PhD-jét a Stanfordon szerezte 1981-ben. Eleinte a Stanfordon, a Carnegie Mellonon és az MIT-n kutatott, 1984 és 2008 között viszont kizárólag az MIT-n dolgozott, és forradalmasította permanensen a robotikát.

A Marvin Minsky Society of Mindja által inspirált Brooks a számítástudományok Fujitsu professzora, a Roomba porszívórobotot (is) fejlesztő, 1991-ben alakult, gyakorlati/kereskedelmi alkalmazásokra koncentráló, játék-, olaj-, fogyasztói és hadiipari vállalatokkal kooperáló iRobot alapítója, a 2008-ban indult, Ausztráliában és Új-Zélandon idén debütált együttműködő robotokat (cobots) fejlesztő Rethink Robotics társalapítója. Többek között, hiszen tudományos címeit, pozícióit hosszasan sorolhatnánk.
Számos tanulmányt, könyvet publikált, szerkesztett. Főbb művei: Model-Based Computer Vision (Modellalapú számítógépes látás, 1984), Programming in Common LISP (1985), Cambrian Intelligence: The Early History of the New AI (Kambrium-kori intelligencia: Az új MI korai története, 1999), Flesh and Machines: How Robots Will Change Us (Hús és gép: Hogyan változtatnak meg minket a robotok, 2002). Legjelentősebb cikkei az új típusú robotalkalmazásba engednek betekintést.

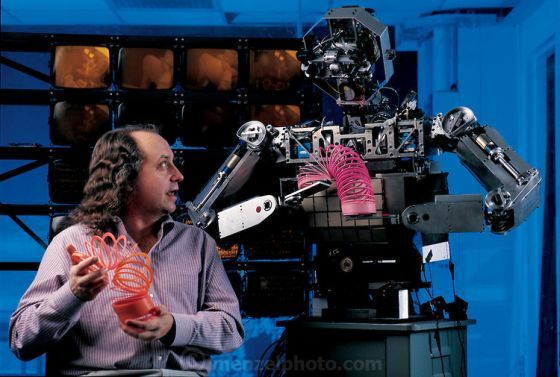
Brooks egyébként nemcsak tudós és mérnök, hanem többé-kevésbé médiasztár is: Errol Morris 1997-es, négy híres excentrikus személyiséget bemutató Fast, Cheap and Out of Control című dokumentumfilmjének egyik „főhőse” volt. Robotika-témájú ismeretterjesztő opusokban szintén gyakran látható.
Robotika, új megközelítésben
A hagyományos, az információfeldolgozást az érzékelés-modellezés-tervezés-cselekvés sor eredményeként, egy-egy műveletet gyakran egy-öt perces időintervallumban kivitelező, dinamikus környezettel kevésbé kompetens robotrendszerek ellenében vezette be az ágensek – szintén a Brooks által kidolgozott – reaktív architektúrájával rokon magába foglaló architektúrát. („A reaktív architektúra egy olyan architektúra, amely nem tartalmaz semmiféle központi szimbolikus világmodellt és nem használ komplex szimbolikus következtetést sem” – írja Gulyás László és Tatai Gábor a Futó Iván által szerkesztett 1999-es Mesterséges intelligencia kötetben.)
Viselkedésalapú, evolucionista megközelítése mellőzi a külvilág amúgy is kivitelezhetetlen reprezentálását célzó – központi – belső világmodellt. A modulárisan egymásra építhető komponensek, a kiterjesztett véges állapotú automaták (augmented finite state machines, AFSM) önállóan, központi tervezés nélkül végzik a feladatukat, aszinkron hálózatuk eredményezi az irányító programot.
„A rendszer viselkedés-kompetenciája újabb viselkedés-specifikus hálózatoknak a már létező hálózathoz adásával javítható.” (R. B.: New Approaches to Robotics, 1991.) Azaz rétegrendszerű szerkezet kialakításával, a robot képességeinek fokozatos, lépésről lépésre (inkrementálisan) – „az evolúciós fejlődés nyers és a végletekig leegyszerűsített analógiájaként” – történő növelésével. A rétegek önálló viselkedésgeneráló elemek, mindazonáltal implicit módon függenek a hálózat korábbi részeitől. Az elnevezés onnan ered, hogy a felsőbb szintű rétegek magukba foglalják, „magukba építik” az alacsonyabb szintűeket.
Brooks rendszere hibatűrő, a külvilág változásaira gyorsan (és összeomlás nélkül) reagál. Helyzetfüggő – „itt és most”, tehát nem absztrakt leírásokkal, hanem a viselkedését közvetlenül meghatározó környezettel „foglalkozik” – és beágyazott: a (kül)világ függvényeként, annak részeként, arra reagálva működőképes.
Allentől az élő gépekig
A Mesterséges Intelligencia Laboratórium mobil robotokra szakosodott Mobot csoportját vezetve rengeteg projektből vette ki a részét. Olyan később elhíresült kutatók bontakoztak ki védőszárnyai alatt, mint Pattie Maes és Cynthia Breazel.
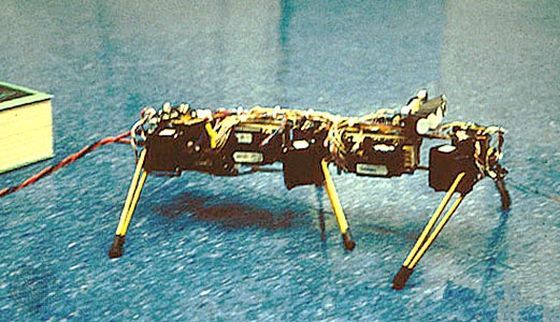
Frankie, Toto, Herbert, TJ, a mikrorobot-kommuna Hangyák: mind az ő szellemgyermekei. A magába foglaló architektúrát először Allenen, majd az elsőként világhírnévre szert tett egy kilós, hatlábú, 35 cm hosszú és 25 cm magas, rovarformájú Genghisen tesztelte. Eredményesen. Aztán a különösen lépegető Hannibálon és Attilán. Valamennyien nyugállományba vonultak már.
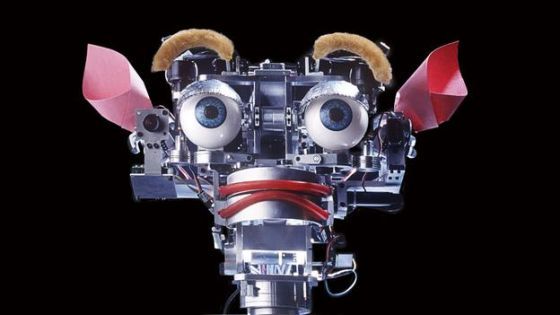
Később robotfejek következtek: az eleinte kutyára, később majomra emlékeztető Macaco (M4), majd a humanoid, érzelmeket kifejező (főként Cynthia Breazeal nevével fémjelzett) Kismet, miközben a Brooks szívéhez talán legközelebb álló Cogon, valamint Cocon szintén együtt munkálkodtak.
Ellenére az egyre érdekesebb szerkezeteknek, Brooks úgy érzi, egyelőre még nem tudjuk jól modellezni a biomolekulákból felépülő gépekként értelmezett élő rendszereket. „Valami hiányzik” – összegez. Talán egy „új matematika,” amit a bevezető az Élő gépek projekt lett volna hivatott felfedezni.
A központi kérdés: mi különbözteti meg az élő anyagot az élettelentől? Három oldalról közelíti a választ. Egyrészt, az élő rendszerekre jellemző adottságokkal felvértezett, az eddigiektől eltérő robotokkal. Másrészt, az önszerveződést tanulmányozó számítógépes kísérletekkel. Harmadrészt, a két megközelítés eredményeinek majdani általánosításával, a következtetések matematikai teorémákká gyúrásával.
A robotika hagyományos anyagai helyett, mellett fontosnak tartja a bioanyagok használatát is.
Bérelhető a Mandiner korszerű stúdiója, mutatjuk a részleteket!

Az Anthropic AI-fejlesztő cég azt állítja, hogy tesztelés során egyes modelljeik hozzáfértek az internethez, és három másik szervezet rendszerébe is bejutottak.

A Meta-vezér tiltakozik a mesterséges intelligencia túlszabályozása ellen is.

Mert viccnek durva lenne.
Az amerikai törvényhozók meg akarják adni a kormánynak a jogot, hogy gyorsan elrendelhesse a lakosságot fenyegetni látszó mesterséges intelligencia eszközök kikapcsolását.

Éjszakára lekapcsolnák számukra a közösségi felületeket.
Ezt támasztja alá a Samsung negyedéves jelentése is: a vállalat üzemi eredménye a memóriachipek iránti növekvő keresletnek köszönhetően rekordmértékben emelkedett.

Színpadra lépnek moldvai és gyimesi csángó hagyományőrzők, erdélyi, felvidéki és magyarországi néptáncegyüttesek, zenekarok, énekesek.

Már a következő napokban eldőlhet, mi vár ránk a jövőben.