
Gyere hozzánk podcastet készíteni!

Bérelhető a Mandiner korszerű stúdiója, mutatjuk a részleteket!
Képzeljünk el egy Google keresőszerű online rendszert, amelyre a Föld összes robotja csatlakozik, és információt kér le az aktuális feladathoz. A folyamatosan tanuló rendszer idővel a robotok egyetemes tudástárházává válhat. Annyit már elért, hogy többszáz kilométer távolságban lévő két gép az egymással megosztott ismereteket használva dolgozott.
Napjaink egyik meghatározó jelensége, hogy soha nem látott információmennyiségre tudunk rákeresni, és aztán fel is dolgozhatjuk. A bőség zavarának kezelésében segítő eszközök (Google Now, Siri, Wikipédia, Watson szuperszámítógép, a Facebook M-je stb.) különféle technológiák egyesülésének köszönhetők. Ha meg akarunk tudni valamit, elég bepötyögni néhány szót, feltenni egy-két egyszerű kérdést, és a Google vagy más kereső, online adatbázis pillanatokon belül, bármiről bármikor találatok sokaságával bombáz le.
Ember mivoltunkból fakadóan azonnal megértjük a nem túl dodonai válaszokat, és ha például a különleges latin-amerikai halétel, a céviche receptje kell, miután megkaptuk, gond nélkül követjük az általában képanyaggal illusztrált írott utasításokat.

RoboAgy
Robotok számára mindenképpen jó hír, hogy nekik is van már hasonló ismerettárházuk. A kihívás viszont összehasonlíthatatlanul nagyobb, mint a mi esetünkben. Még a legegyszerűbb feladatokhoz is részletes utasítássorok kellenek, ráadásul a siker akkor sem garantált.
Ashutosh Saxena, a Stanford Egyetem kutatója és más neves amerikai felsőoktatási intézményeket (Berkeley, Brown, Cornell) képviselő kollégái mindezek ismeretében vágtak bele évekkel ezelőtt a RoboAgy (RoboBrain) projektbe, gépunokatestvéreink Google-jába. Bármilyen robot hozzáférhet, amiért „cserébe” a számítási felhőben leledző agy összegyűjti a feladat végrehajtásával kapcsolatos infókat. Ezekből az infókból más robotok tanulnak majd, miközben az agy őket is leszívja, és így tovább.

A nagyívű terv kivitelezéséhez azonban egészen földhözragadt problémákat kellett megoldani. Kezdésként például azt, hogy a robotok sokféle érzékelővel rendelkeznek, ezer és egyféleképpen tervezik őket stb. stb. Ezzel szemben az innen-onnan, nagyon változatos és eltérő forrásokból (web, adatbázisok) gyűjtögetett ismereteket mindegyikük számára használható módon kell tárolni, miközben az agynak sokfajta módon kell különféle kérdések tömkelegét kezelnie. Szerencsére eleve úgy tervezték, hogy már meglévő szolgáltatásokhoz is kapcsolódjon.
Három főkomponenséből kettő volt ilyen. Az egyik a 2001 – Űrodisszeia túlélő űrhajósa előtt fejet hajtó Tell Me Dave „nyelvtanár” természetes nyelven ad utasításokat robotoknak. A másik, a PlanIt a tervezésben segíti őket: hogyan tájékozódjanak egy helyiségben és menjenek végig rajta, miként ragadjanak meg és cipeljenek dolgokat stb. A harmadik tárgyakat és személyeket ismer fel.
A tojások hamar eltörnek, ha nem vigyázunk rájuk
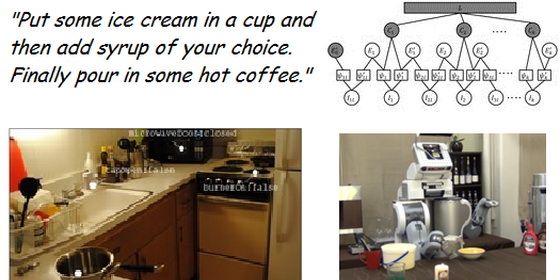
Saxena és társai az ismereteket gráfként megjelenítő hálózatelméletből indultak ki. A gráf „konténerként” működő csomópontjaiban különféle dolgok kapnak helyet: képek, szövegek, tapintásalapú adatok, megtanult fogalmak. RoboAgy az új információt élek csomópontokat összekapcsoló sorozataként kezeli. Például az „ülő ember meg tud fogni egy csészét” él a „csésze”, „pohár” és a „képes megfogni” csomópontokhoz köthető. Ha egy robotot e három vagy valami hasonló érdekli, letöltheti őket.

RoboAgy használatát tojásdobozzal demonstrálták először. A robotnak az asztal egyik végéből a másikba kellett eljuttatnia, viszont vigyáznia kellett, mert a tojás törékeny és óvatosan kell hozzányúlni. Ezt az információt az agy lekérdezésével tudta és tanulta meg. Nem feleslegesen, mert később más területeken, például villanykörte megfogásánál is hasznosíthatja. A rendszer egyik fontos tulajdonsága ugyanis, hogy a bizonyos szituációban megszerzett ismeret más szituációkra is alkalmazható.
Az ambiciózus terveknek megfelelően az ismeretbázist nagyobb gyűjteményekkel, például online videókkal tervezik bővíteni. A gép „hogyan csináljam” típusú mozgókép-anyagokból tanulná meg, miként hajtson végre egy csomó feladatot.
A potenciál óriási, megváltoztathatja a robotok tanulási módját. Gondoljunk csak saját magunkra, hogy az internetes tudástárak, keresők milyen hatást gyakorolnak mindennapjainkra, gondolatainkra a minket körülvevő világról, környezetünkkel folytatott interakcióinkra. RoboAgy valami nagyon hasonlót érhet el „szellemgyermekeinkkel.”
Megosztott messzi munka
Egy komoly dobása volt már, amit egyesek kicsit túlozva azonnal a mesterségesintelligencia-kutatás mérföldköveként kezdtek emlegetni.
A párszáz kilométer távolságban, a Cornell és a Brown Egyetem laborjában tartózkodó két robot az agy segítségével osztott meg egymással ismereteket, majd dolgozott velük.
A Cornell kutatói a Tell Me Dave önkéntesei segítségével tanítanak robotokat feladatok abszolválására. Közben persze nemcsak ők, hanem a rendszer gépitanulás-algoritmusa is pallérozódik. Ezt a tudást használta fel a kaliforniai Willow Garage-ben kutatási célokra fejlesztett PR2, amikor egyszerű munkákat kellett végrehajtania, például csészéket összeszedni az asztalról, majd lefelé fordítva elhelyezni őket.
A Brown Egyetemen egy másik robot, az ipari alkalmazásra szánt Baxter PR2 ismereteiből kiindulva jött rá, hogyan oldja meg ugyanazt a feladatot. A kutatók bonyolítottak rajta egy kicsit: a csészéket másként rendezték el, ráadásul Baxter nem is hasonlít PR2-re.
Az autonómia a cél
Az ismeretmegosztás bevált, ami azt vetíti előre, hogy idővel a robotokat nem kell sziszifuszi munkával újraprogramozni, és változó körülmények között is képesek valóra váltani küldetésüket.
A Baxter tanulására specializálódott csoportot vezető Stefanie Tellex szerint RoboAgy közreműködése az autonómia felé mutat. A nagyobb önállóságra praktikus ok miatt lenne szükség: ahány helyiségbe belép a robot, annyi környezettel kell boldogulnia, annyiféleképpen kell viselkednie. Valamilyen szintű autonómia nélkül bajosan menne.
Saxena biztos benne, hogy a jövőben egyre több információt osztanak meg egymással, és RoboAgy is folyamatosan bővülni fog.

Az „ismeretátvitelhez” persze keményen fel kellett készülni. A legfőbb problémát az okozta, hogy a két robot teljesen más, azaz egyszerű utasításokkal nem boldogultak. Hiába határozták meg, hogy PR2 milyen pozícióban fogta meg ujjaival a csészét, semmire nem mentek vele, mert Baxternek nem ugyanolyanok az ujjai. Tellex csoportja végül kitalált egy sémát, amellyel működtek a két platform közötti utasítások. Az ideális egyébként az lenne, ha a robot saját és „kollégája” testhelyzetét összehasonlítva, magától értelmezné az információt.
Nick Roy, az MIT Számítástudományi és Mesterséges Intelligencia Laboratóriumának (CSAIL) tanára szerint nagyon sok kutató szeretné, ha a robotok valóban megosztanák egymás között ismereteiket, amit a folyamatosan növekvő, kvázi korlátlan sávszélesség és a számítási felhő lehetővé is tesz.
Bérelhető a Mandiner korszerű stúdiója, mutatjuk a részleteket!

Éjszakára lekapcsolnák számukra a közösségi felületeket.

Gyurcsány volt embere kilép a pártból is.

Aki most tapsol az erőszakhoz, holnap könnyen kerülhet olyan helyzetbe, hogy ő az áldozat.

Az 1700-as évekbeli alapító atyák színtiszta elméleti konstrukciója végső soron ki tudta állni az idők próbáját. Eddig. Rajcsányi Gellért írása.

Különben úgy járnak, mint az olasz fasizmus, amire ránézett Göbbels doktor, és azt mormogta magában, hogy ez félmunka.

A kommentelők sem értik, mi történt a kormánypárti oldalon.

Vasárnap éjfélig a Hajógyári-sziget már csak korlátozottan látogatható.

Van mit átgondolni.