
Gyere hozzánk podcastet készíteni!

Bérelhető a Mandiner korszerű stúdiója, mutatjuk a részleteket!
A robotika sokak számára a pontosság és merevség szinonimái. Az utóbbi években azonban megjelent a puha robotok technológiája, ami olyan rugalmasságot és flexibilitást adott a gépeknek, ami korábban nem volt lehetséges.
4D nyomtatásnak nevezzük a puha, gyakran hidrogélekből készült, alakváltoztatásra képes darabok 3D nyomtatását. A negyedik dimenzió a nyomtatott darabok időfüggő reakciójára utal, ami valamilyen inger hatására jön létre. Ilyen inger lehet például a forró levegő, a melegvíz, elektromosság, mágnesesség, pneumatikus nyomás.
Kézzelfogható eredmény

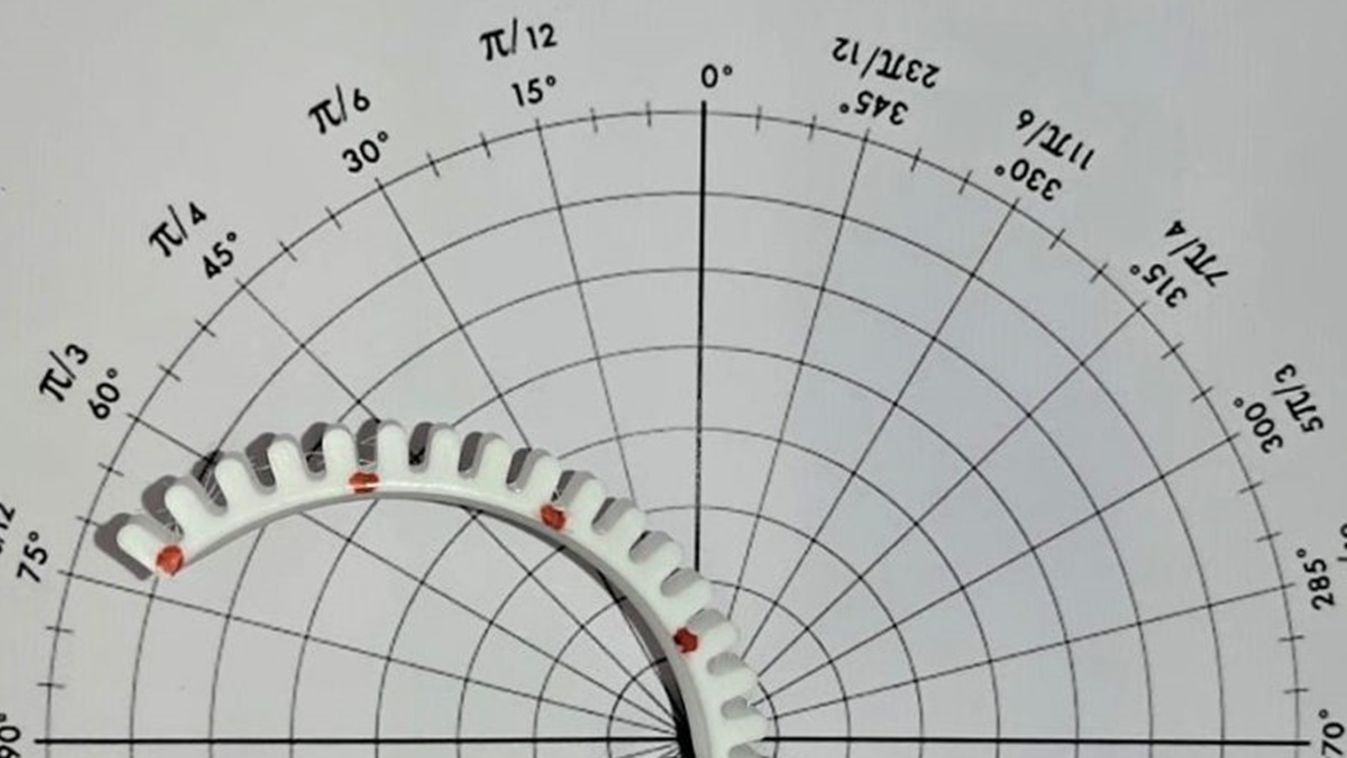
Egy nemzetközi kutatócsoport olyan puha, bőrszerű anyagból (SPA) készült, harmonikás szerkezetű ujjakra hasonlító eszközt fejlesztett ki, amely nyomásváltozás hatására kiegyenesedik és meghajlik. A merev robotok hasonló alkatrészeihez képest olcsó, könnyű, rugalmas és egyszerűen előállítható eszköz remekül hasznosítható műtéti, terápiás és rehabilitációs orvostechnikai eszközökben, valamint zöldség- és gyümölcsszüretelésnél alkalmazott ipari markolókhoz.
Az anyag, mely egyszerre rugalmas és erős
Az eszközhöz a Ninjaflex nevű anyagot használták, mely egy gumiszerű, egyszerre rugalmas és tartós, TPU alapú anyag. Azért is tökéletes választás a Ninjaflex, mert 3D technológiával légbuborékok nélkül nyomtatható és hiperelasztikus tulajdonságokkal rendelkezik, melyek rugalmasságot és érzékenységet biztosítanak. Jelenleg az egyik legnagyobb kihívás a lágy robotok 4D nyomtatása kapcsán, a mozgásuk modellezése és kiszámítása, elsősorban az anyag kiszámíthatatlansága miatt. A lineáris analitikai modell gyakran nem képes pontosan megjósolni a 4D nyomtatással készült eszközök működés közbeni viselkedését, azonban a numerikus szimulációk a nem lineáris anyagra vonatkozó alapelvekkel kiegészülve javítják a pontosságot.
A befektetett idő megtérül
A numerikus eredmények alapján fejlesztett gépi tanulási (ML) technikák előnyeinek felhasználása azonban időt és energiát takaríthat meg a tervezés során. A tisztán adatvezérelt modellezési megközelítés lehetővé teszi a működés során tapasztalható viselkedés előrejelzését különböző körülmények és feltételek között, pontos anyagmodellek nélkül is. Egy neurális hálózati algoritmus született meg, mely kombinálja a véges elemeken alapuló elemzési modellezés (FEM) pontosságát és a gépi tanulás időhatékonyságát. A modell létrehozásához a FEM-et használták arra, hogy betanítsa az adatokat és a mesterséges ideghálózatot (ANN). Így a tanulási folyamat eredményeként megjósolhatóvá válik a beáramló levegő hatására létrejövő mozgás mértéke és iránya.
Az ML és a 4D hatékony páros
A megbízható ML modell megalkotása után a fejlesztők a 4D technológiával nyomtatott SPA kialakításához szükséges geometriai specifikációkat vizsgálták. Az alak előrejelzésére szolgáló osztályozási modell lehetővé teszi a felhasználó számára, hogy 4D nyomtatásban elérje a kívánt mozgást. Az egyirányú varianciaanalízis (ANOVA) eredményeinek köszönhetően azonosíthatóak lettek azok a változók, amelyek maximalizálják a költség, és az energiaigény hatékonyságát.
Az osztályozási modellt a hiperparaméterek optimalizálásával dolgozták ki, így 94,3 százalékos pontossággal volt képes megkülönböztetni a három különböző ujjat, mely eredményt több kísérlettel igazolták különböző méretű objektumokkal. A gépi tanulás alapú modellezés ezen megközelítése a 4D nyomtatás, illetve a 3D/4D nyomtatású puha robotikai vizsgálatok egyéb típusaihoz igazítható, melynek során elsőként meghatározhatóak az új tervezési paraméterek, majd a kísérleti eredmények validálása után a FEM-ben minden szimulációs adat felhasználható, hogy új ML modellt hozzon létre. Ezt az eredményt fel lehet használni olyan vezérlőrendszerek kifejlesztésére, amelyek ezt a technológiát és kialakítást alkalmazzák, vagy zárt láncú, 4D nyomtatású lágy robotok és alkatrészeik tervezéséhez.
Bérelhető a Mandiner korszerű stúdiója, mutatjuk a részleteket!

A Toyota 20. században kifejlesztett technológiája új időszámítást hozhat az ország űriparában.

Ukrajna bemutatta legújabb légibombáját, amely küllemében a török MAM-L-re emlékeztet, de új megoldásokat is tartalmaz.

Robotikában hagyták állva a világot a magyar általános iskolások.


A mesterséges intelligenciával ellátott eszközök a jövő légibázisainak állandó tartozékai lehetnek.

Ez a valóság 2024-ben.

A Paksi Erőmű 2000 helyett 960 megawatton termel.
A Milan legendás labdarúgója 66 éves volt.