
Gyere hozzánk podcastet készíteni!

Bérelhető a Mandiner korszerű stúdiója, mutatjuk a részleteket!
A német Hohenheimi Egyetem szerint az ország gyümölcsfáinak mintegy 80 százaléka nincs rendszeresen metszve – annak ellenére, hogy ezzel erősebbé és ellenállóbbá válik a fa a betegségekkel és kórokkal szemben. Ezért egy egyetemi csapat robotot készít a munka elvégzésére.
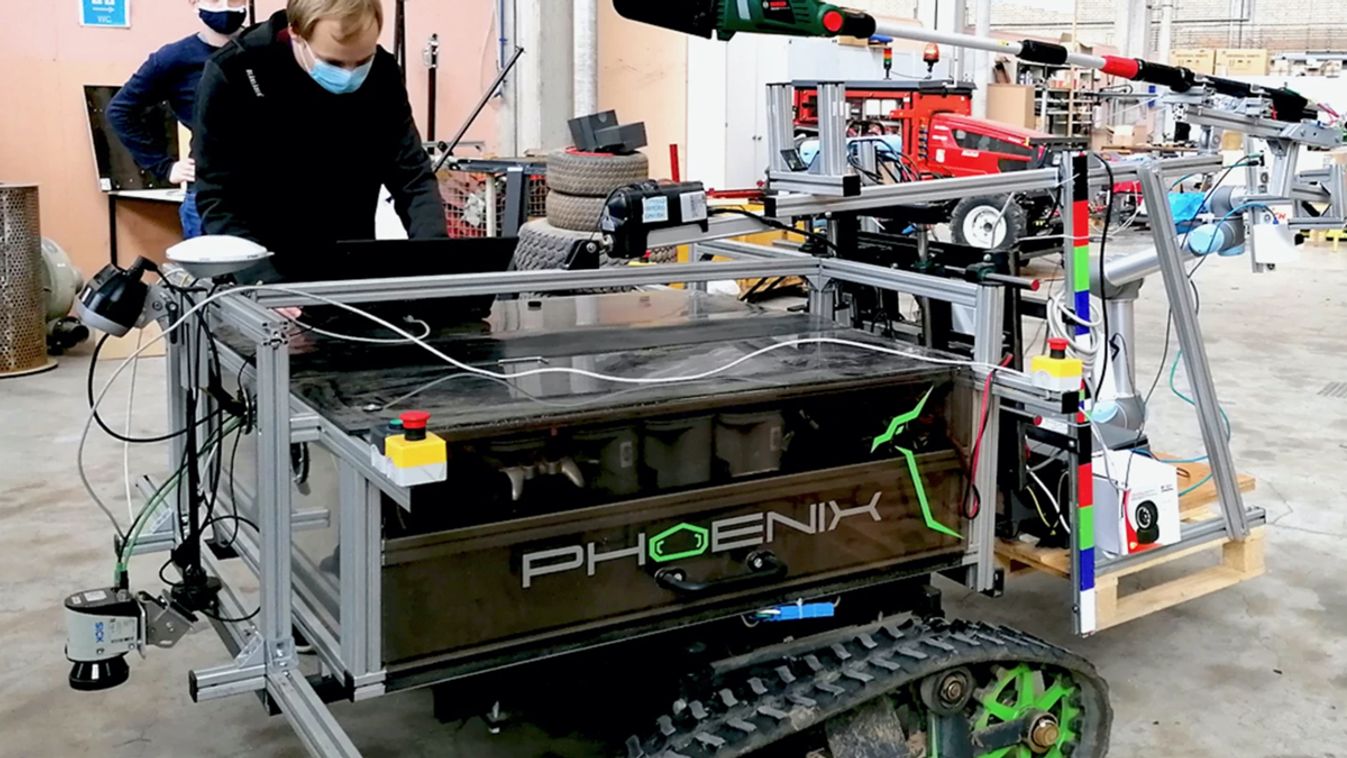
A Phoenix néven ismert kerekes robotot Dr. David Reiser mezőgazdasági technikus, Jonas Straub doktorandusz és Jonas Boysen kutatási asszisztens fejleszti.
A tervek szerint a metszés úgy fog zajlani, hogy a robot először körbejárja a fát, és készít róla egy 3D-s szkennelést a speciális, digitális fényerősségmérő műszerével, illetve az optikai kamerájával. Ezután a számítógép az adatok alapján létrehozza a fa pontfelhő modelljét, bemutatva a lombkoronának a 3D-s szerkezetét. Majd egy mesterséges intelligencián alapuló szoftver elemzi ezt a struktúrát, és meghatározza, hogy mely ágakat kell levágni annak érdekében, hogy a korona a lehető legoptimálisabb formába kerüljön. Végül pedig a Phoenix robot automatikusan elvégzi a tényleges metszést egy kis motoros fűrésszel - ami a csuklós kar végén található - hogy eltávolítsa a problémás ágakat.

Bérelhető a Mandiner korszerű stúdiója, mutatjuk a részleteket!

Az Anthropic AI-fejlesztő cég azt állítja, hogy tesztelés során egyes modelljeik hozzáfértek az internethez, és három másik szervezet rendszerébe is bejutottak.

A Meta-vezér tiltakozik a mesterséges intelligencia túlszabályozása ellen is.

Mert viccnek durva lenne.
Az amerikai törvényhozók meg akarják adni a kormánynak a jogot, hogy gyorsan elrendelhesse a lakosságot fenyegetni látszó mesterséges intelligencia eszközök kikapcsolását.
Ezt támasztja alá a Samsung negyedéves jelentése is: a vállalat üzemi eredménye a memóriachipek iránti növekvő keresletnek köszönhetően rekordmértékben emelkedett.

Már veszik vissza az embereket, nem jött össze a költségcsökkentés.

Embercsempész-hálózatok körében kezdtek terjedni a téves értelmezések.

Ha a miniszterelnök mondja meg, hogy ki (nem) lehet a köztévé vezetője, akkor az kormánytévé.