
Gyere hozzánk podcastet készíteni!

Bérelhető a Mandiner korszerű stúdiója, mutatjuk a részleteket!
Az önvezető autók, az autonóm drónok és a raktári robotok alapjául szolgáló számos technológia felhasználásával a kutatók a sebészeti robotok automatizálásán is dolgoznak. A kutatott módszerek még mindig messze vannak a mindennapi használattól, de a fejlődés egyre gyorsul.
A robotkar működtetése és optimalizálása
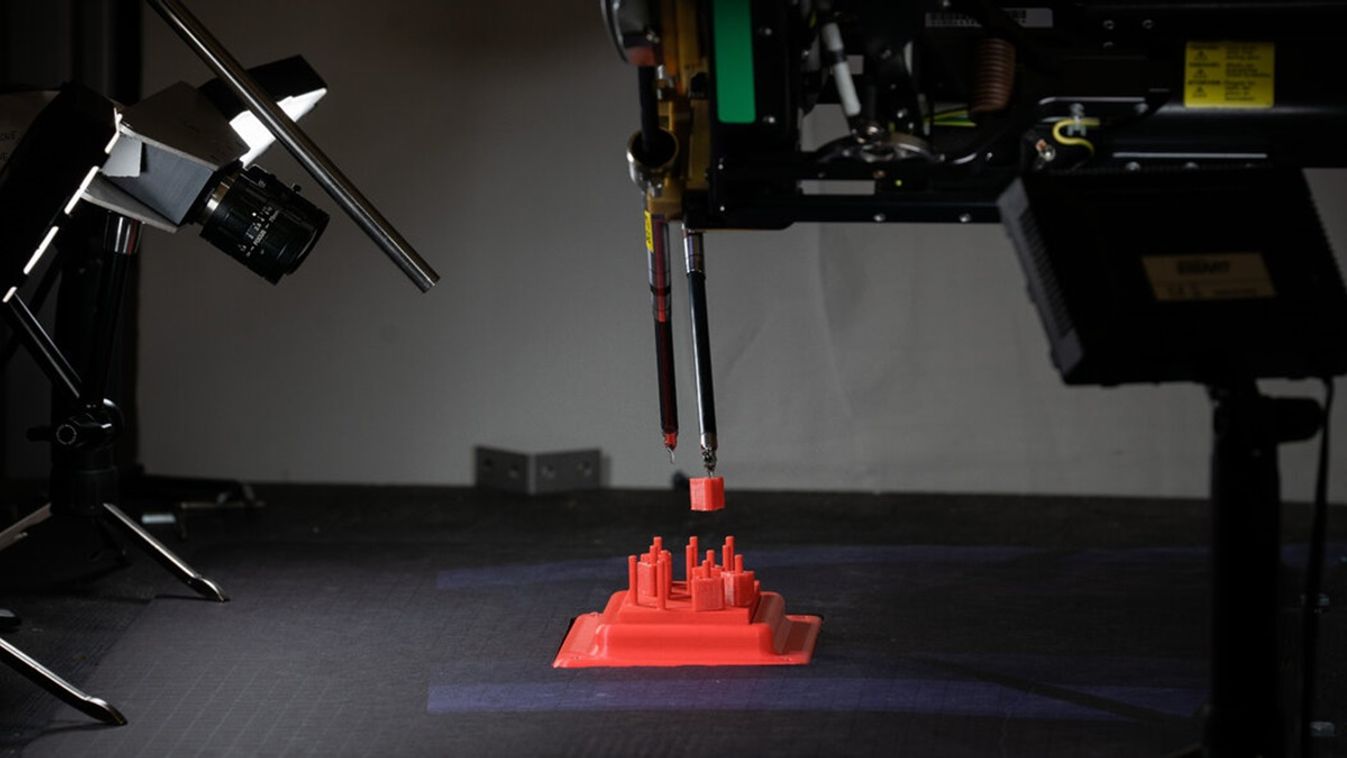
Dr. Danyal Fer, a Berkeley-i Kaliforniai Egyetem kutatója és csapata egy robotkar működését mutatta be, melyet az orvostudomány régóta a sebészi műtétek elvégzésére igyekszik optimalizálni. A karokat Dr. Fer saját székéből egy kontroller segítségével irányította, melyek a szoba másik végén ugyanazt tették, mint amit a doktor. Ennek, a már ismert technológia kiterjesztésén dolgoznak a kutatók, melyet Dr. Fer demonstrált; elengedte a kontrollert, és egy újfajta számítógépes szoftver vette át az irányítást. Miközben ő és a többi kutató csak nézték, a robot teljesen önállóan kezdett mozogni.

Az egyik kar egy apró műanyag gyűrűt emelt fel az asztalról, majd átadta a gyűrűt a másik karnak, ami felakasztotta a megfelelő helyre. A robot ugyanezt tette meg több gyűrűvel, és ugyanolyan gyorsan hajtotta végre a feladatot.
Az „edzést” eredetileg emberek számára tervezték. A mozgatása által megtanulják a sebészek a Berkeley-hez hasonló robotok kezelését. A Berkeley-csapat új kutatási közleménye szerint a tesztet végrehajtó automatizált robot ügyességében, pontosságában és gyorsaságában képes megmérkőzni vagy akár meghaladni az embert. A projekt egy sokkal szélesebb körű erőfeszítés része, mégpedig, hogy a mesterséges intelligenciát bevigyék a műtőbe.
Képességek és célok
A cél nem a sebészek eltávolítása a műtőből, hanem a műtétek egyes fázisainak automatizálásával megkönnyíteni a rájuk nehezedő terheket, valamint a további sikerráta növelése, azokon a területeken, ahol van hová fejlődni.
A robotok képességei már meghaladhatják az emberi pontosságot bizonyos műtéti feladatoknál, például csontok behelyezésénél (különösen kockázatos feladat térd- és csípőprotézisek során). A remény az, hogy az automatizált robotok pontosabbá tehetik az egyéb feladatokat, például a bemetszéseket vagy a varrást, és csökkenthetik a kockázati faktort.
Előzmények
Öt évvel ezelőtt a Washington DC-ben működő Children's National Health System kutatói egy olyan robotot terveztek, amely a műtét során automatikusan varrta a disznó belét. Figyelemre méltó lépés volt a Dr. Hager által elképzelt jövő felé. A kutatók apró markereket telepítettek a sertés belébe, amelyek közeli infravörös fényt bocsátottak ki, így segítették irányítani a robot mozgását.
Azonban ez a módszer korántsem praktikus, mivel a markereket nem könnyű beültetni vagy eltávolítani. Az elmúlt években a mesterséges intelligencia kutatók jelentősen javították a számítógépes látás erejét, amely lehetővé teheti a robotok számára, hogy önállóan végezzenek műtéti feladatokat ilyen és ehhez hasonló jelzők nélkül.
A változást az úgynevezett ideghálózatok, matematikai rendszerek vezérlik, amelyek hatalmas mennyiségű adat elemzése által sajátítanak el képességeket. Például több ezer macskafotó elemzésével egy idegháló megtanulhatja felismerni a macskát. A neurális hálózat ugyanúgy tanulhat a sebészeti robotok által készített képekből.
Gépi látás és edukáció
A sebészeti robotokat kamerákkal látják el, amelyek háromdimenziós videókat rögzítenek az egyes műveletekről. A videó egy keresőben folyik, amelybe a sebészek belenéznek és a robot szemszögéből látják, miközben irányítják a műveletet. Ezek a képek részletes útitervet is tartalmaznak, amely bemutatja a műtétek végrehajtását. Segíthetnek az új sebészeknek megérteni ezeknek a robotoknak a használatát, továbbá segíthetik a robotokat, a feladatok önálló kezelésében. Olyan képek elemzésével, amelyek megmutatják, hogy egy sebész hogyan vezeti a robotot, az ideghálózat ugyanezeket a képességeket tanulhatja meg.
A Berkeley kutatói is ennek a rendszernek az elvén dolgoztak robotjuk automatizálásán, amely a da Vinci Surgical System-re épül. Ez egy kétkarú gép, amely a sebészeknek évente több mint egymillió eljárást segít végrehajtani. Dr. Fer és munkatársai képeket gyűjtenek arról a robotról, amely emberi irányítás alatt mozgatja a műanyag gyűrűket.
A rendszernek azonban vannak még hiányosságai. A robotkarok egyelőre millimétereket képesek tévedni a megkapott utasításhoz képest. Ez valószínűleg az eszközök elhasználódásának köszönhető, amely miatt a mozgás pontatlanná válik.
Az emberi operátorok tudattalanul kompenzálhatják azt, amit a rendszer még nem képes. Az automatizált technológiával gyakran az a probléma, hogy küzd a változásokkal és a bizonytalansággal. Az autonóm járművek még mindig messze vannak az elterjedt használattól, mert még nem elég ügyesek ahhoz, hogy kezeljék a mindennapi világ összes változóját.
Pontosság javítása
A Berkeley csapata úgy döntött, hogy felépít egy új neurális hálózatot, amely elemzi a robot hibáit, hogy kiderítsék, mennyit veszít pontosságából a napok során. Amint az automatizált rendszer képes lesz számolni ezzel a változóval, a robot megragadhatja és elmozdíthatja a műanyag gyűrűket, az emberi kezelő irányításának megfelelően.
Más laboratóriumok különböző megközelítéseket próbálnak ki. Axel Krieger, a Johns Hopkins kutatója, aki 2016-ban részt vett a disznóvarrási projektben, egy másik robotkar automatizálásán dolgozik, amely kevesebb mozgó alkatrésszel rendelkezik, és amely következetesebben viselkedik, mint a Berkeley-csapat által használt robot.
Sok akadály leküzdése vár még a tudósokra, mielőtt az orvostudomány teljes biztonsággal használni tudná a mesterséges intelligencia által vezérelt robotokat. De az egészen biztos, hogy az automatizálás belátható időn belül olyan dolog lesz, amely a sebészek mellett működik majd és nem pedig helyettesítve őket. Amikor ez megtörténik óriási változás áll be, mind a technológia, mint pedig az orvostudomány életében. A kiterjesztett műtéti lehetőség, például a távból elvégezhető műtétek sok életet menthetnek a harctéren, vagy az űrben. Egyelőre a jel fáziskésése ezt ugyan nem teszi lehetővé, de a kutatók azon dolgoznak, hogy emberéleteket lehessen menteni, akár sok száz vagy ezer kilométer távolságból.
Bérelhető a Mandiner korszerű stúdiója, mutatjuk a részleteket!

A Toyota 20. században kifejlesztett technológiája új időszámítást hozhat az ország űriparában.

Robotikában hagyták állva a világot a magyar általános iskolások.


A mesterséges intelligenciával ellátott eszközök a jövő légibázisainak állandó tartozékai lehetnek.

Bármilyen sebészeti beavatkozás – még a legkisebb is – komoly megfontolást igényel, különösen fiatalkorúaknál.

A jó befektetés volt a kulcs.

Amerikai szenátorok egy csoportja lobbizik az Oroszország és egyes partnerei elleni szankciók fokozása érdekében.

Mindenki megtekintheti, mi vár ránk a 12 éves időkorláttal, csak sokkal alacsonyabb szinten és előre megfontoltan. (Konkrétan nagyvállalatok fogják összeválogatni a képviselőket).